




Motor subacuático de 24 V ~ 36 V, motor impermeable, empuxe de 7 kg ~ 9 kg
Descrición
O motor sen escobillas subacuático SW4025 ten unha potencia nominal de 24~36 V CC e está especialmente deseñado para drons/robots subacuáticos. Este modelo non ten hélice, polo que os usuarios poden deseñar a súa propia hélice e fixala con parafusos.
Este é un motor sen escobillas ordinario, pode ser accionado por calquera controlador ESC de dron ordinario ou controlador de motor sen escobillas ordinario.
Fermosa forma, longa vida útil, tecnoloxía de baixo ruído, alta taxa de aforro de enerxía, alto par e alta precisión.
É amplamente utilizado en equipos electrónicos de precisión, equipos de automatización, equipos acuáticos e subacuáticos, drons de avións modelo aéreos e robots intelixentes.
Antes de realizar un pedido, asegúrate de que tes a capacidade de deseñar a hélice.
Parámetros
| Tipo de motor | Motor sen escobillas subacuático |
| Peso | 310 g |
| Empuxe subacuático | 7 kg ~ 9 kg |
| Tensión nominal | 24~36V |
| Valor KV | 200~300 |
| velocidade de descarga | 7000 |
| potencia nominal | 450~800 W |
| corrente cargada | 15~23A |
| Par nominal | 0,9 N*m |
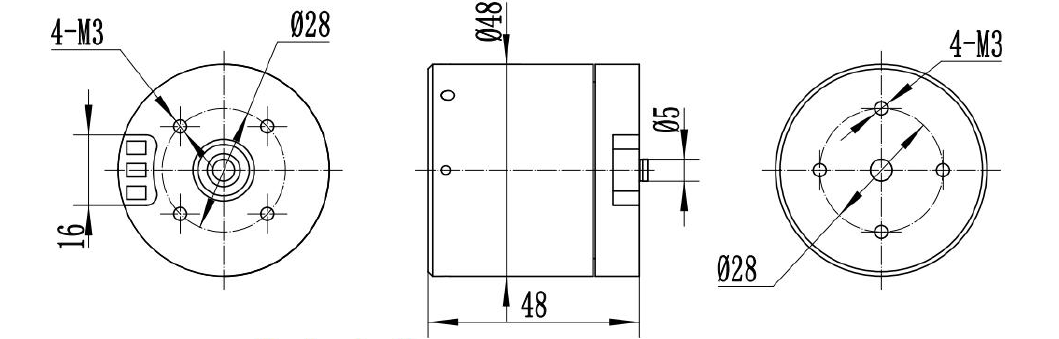
Debuxo de deseño: buratos de parafuso na parte superior usados para fixar a hélice
Sobre os motores subacuáticos
Dado que o motor sen escobillas usa conmutación electrónica, o funcionamento do motor sen escobillas debe adaptarse á fonte de alimentación CC da tensión do motor, ao controlador (ESC) e ao sinal de control de velocidade.
Tomemos como exemplo un ESC de modelo común. Primeiro desconecte a fonte de alimentación, conecte os cables do motor e a liña de sinal de velocidade, o acelerador percorre a posición máis alta (ciclo de traballo completo), conecte a fonte de alimentación, escoitará dous sons de "caída", o acelerador percorrerá rapidamente a posición máis baixa e, a continuación, poderá escoitar o arranque normal do motor, son "caída ---- caída". Completada a calibración do percorrido do acelerador, poderá arrincar o motor normalmente. (O modo de funcionamento do ESC pode variar segundo o fabricante; consulte o manual do modelo de ESC correspondente ou consulte co fabricante do ESC para obter máis detalles).
Os clientes poden usar un ESC (control de velocidade eléctrico) de dron normal para impulsar este motor.
Só producimos motores e non fornecemos ESC.
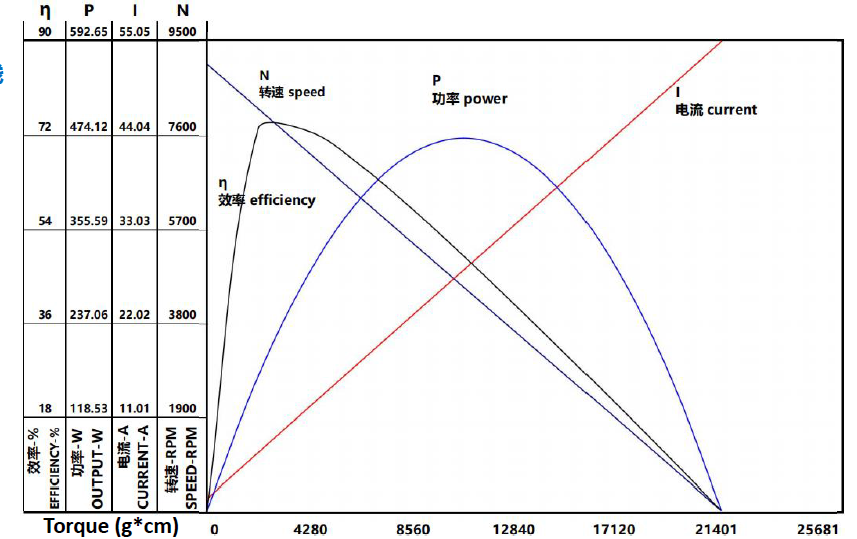
Curva de rendemento do motor SW2216 (16V, 550KV)
Vantaxes do motor subacuático
1. Resistente á auga e á humidade para evitar curtocircuítos nos compoñentes eléctricos dentro da cámara.
2. Bloqueo eficaz do po e das partículas para evitar o desgaste dos rolamentos.
3. Manteña a cavidade seca para evitar que o motor e as pezas se corroan e oxiden, o que pode provocar un mal contacto ou fugas.
Aplicacións
●Instrumento electrónico de precisión
●Equipos de automatización
●Equipamento subacuático
●Modelo de avión dron
●Robot intelixente
Eixo de saída
1. Método de cableado
En primeiro lugar, o motor, a fonte de alimentación e o ESC deben seleccionarse con precisión segundo a carga e as condicións de uso. Unha tensión de alimentación demasiado alta pode danar o motor e o ESC. A potencia de descarga da fonte de alimentación é insuficiente para permitir que o motor alcance a potencia nominal e afecta o uso do efecto. A selección do ESC tamén debe coincidir coa tensión nominal do motor. Os parafusos de instalación do motor non deben ser demasiado longos para non danar a bobina do motor. Antes de conectar, por seguridade, retire a carga do motor, primeiro conecte os tres cables do ESC e do motor (os tres cables pódense cambiar en dous para cambiar a dirección do motor) e, a continuación, conecte a liña de sinal do ESC, prestando atención á orde de cableado da liña de sinal, non conecte á inversa. Finalmente, conecte a fonte de alimentación de CC; a polaridade positiva e negativa non se pode invertir. A maioría dos ESC do mercado teñen protección inversa. Sen protección inversa, a polaridade positiva e negativa na fonte de alimentación dos ESC corre o risco de queimarse.
2. Calibración do percorrido do acelerador.
Ao usar o ESC por primeira vez, ou ao cambiar a fonte do sinal PWM, ou ao usar o sinal do acelerador fóra de calibración durante un período prolongado, cómpre calibrar o percorrido do acelerador.
Información sobre prazos de entrega e embalaxe
Prazo de entrega para as mostras:
Motores estándar en stock: en 3 días
Motores estándar sen stock: dentro de 15 días
Produtos personalizados: aproximadamente 25~30 días (dependendo da complexidade da personalización)
Prazo de entrega para a construción dun novo molde: xeralmente uns 45 días
Prazo de entrega para a produción en masa: segundo a cantidade do pedido
Envasado
As mostras están embaladas en esponxa de escuma cunha caixa de papel, enviadas por correo expreso
Produción en masa, os motores embalanse en caixas de cartón ondulado con película transparente no exterior. (envío por vía aérea)
Se se envía por mar, o produto embalarase en palés

EnvasadoMétodo e prazo de entrega
| DHL | 3-5 días laborables |
| UPS | 5-7 días laborables |
| TNT | 5-7 días laborables |
| FedEx | 7-9 días laborables |
| Servizos médicos de emerxencia | 12-15 días laborables |
| Correos de China | Depende do país ao que se dirixa o barco |
| Mar | Depende do país ao que se dirixa o barco |

método de pago
| método de pago | Tarxeta MasterCard | Visado | Corrección electrónica | PAGAR MÁIS TARDAR | T/T | Paypal |
| Prazo de entrega da orde de mostra | uns 15 días | |||||
| Prazo de entrega para pedidos a granel | 25-30 días | |||||
| garantía de calidade dos produtos | 12 meses | |||||
| Envasado | embalaxe nunha soa caixa, 500 pezas por caixa. | |||||
Envíanos a túa mensaxe:
Categorías de produtos
-

Micromotor paso a paso de 3,3 V e 6 mm de baixo ruído e alta calidade...
-

Eixo de parafuso M3 bifásico de 10 mm, mini engrenaxe escalonada...
-

Motor de CC con escobillas N20 con caixa de cambios 1024, saída ...
-

Motor paso a paso de alta precisión de 42 mm híbrido NEMA 17...
-

Motor paso a paso de imán permanente de baixo ruído de 50 mm de diámetro...
-

Motor paso a paso híbrido NEMA 23 de alto par de 57 mm m...