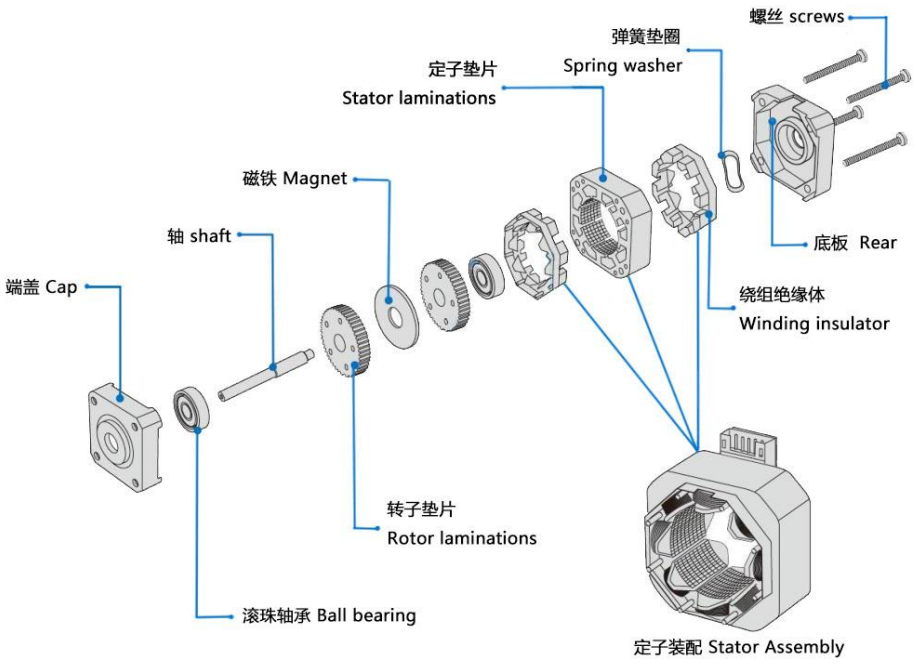
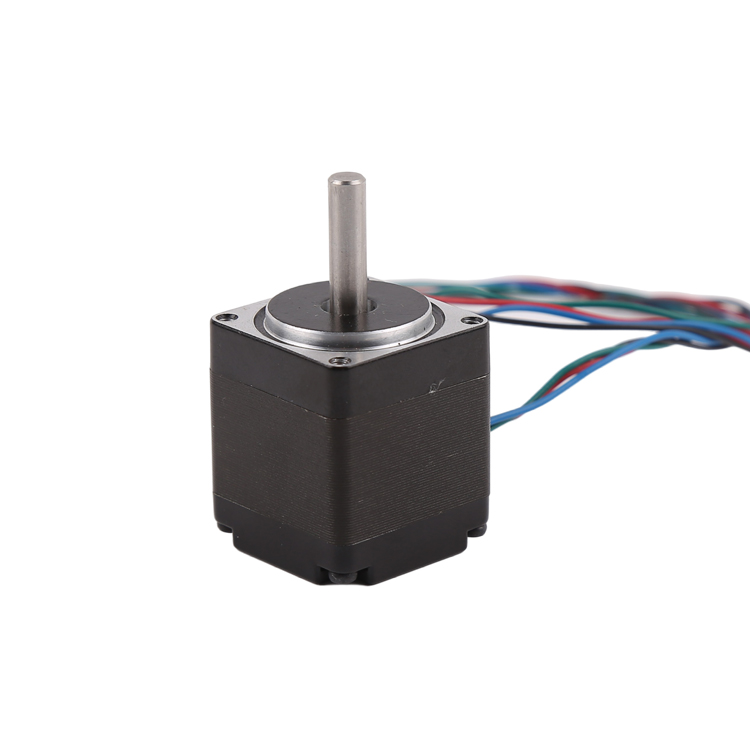
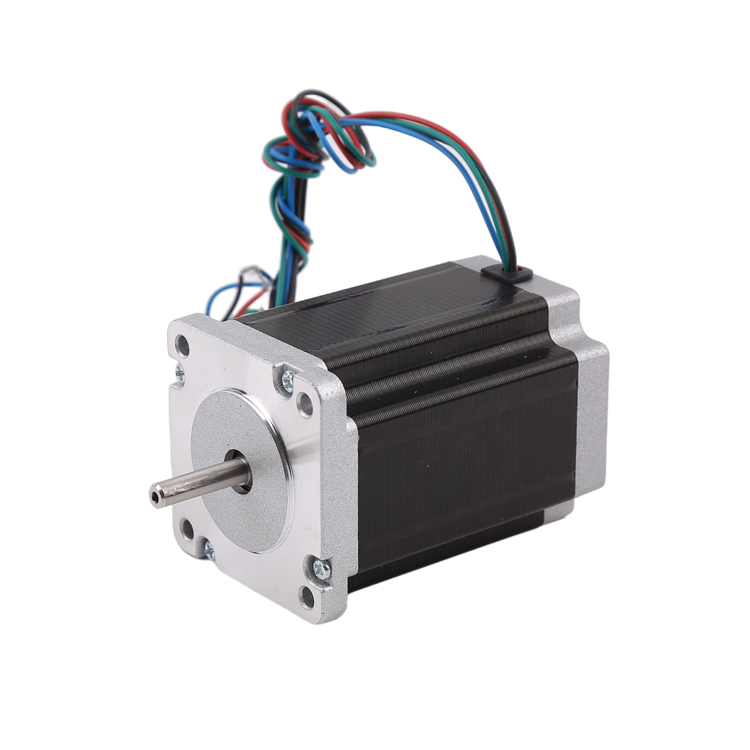
Un motor paso a paso é un motor eléctrico que converte a enerxía eléctrica en enerxía mecánica, e o seu par e velocidade de saída pódense controlar con precisión controlando a fonte de alimentación.
Eu, as vantaxes do motor paso a paso
Alta precisión
O ángulo de rotación do motor paso a paso é proporcional ao número de pulsos de entrada, polo que é posible controlar con precisión o número e a frecuencia dos pulsos para lograr un control preciso da posición e a velocidade do motor. Esta característica fai que os motores paso a paso destaquen en aplicacións que requiren un posicionamento de alta precisión, como máquinas-ferramenta CNC, prensas de impresión e máquinas téxtiles.
Os motores paso a paso adoitan ter unha precisión de entre o 3 % e o 5 % por paso e non acumulan o erro do paso anterior ao seguinte, é dicir, non xeran erros acumulativos. Isto significa que os motores paso a paso son capaces de manter unha alta precisión posicional e repetibilidade do movemento durante longos períodos de tempo ou movemento continuo.
Altamente controlable

O funcionamento do motor paso a paso conséguese controlando a corrente de pulsos, polo que o control do motor pódese realizar mediante programación por software. Esta programabilidade permite que os motores paso a paso satisfagan as necesidades dunha ampla variedade de aplicacións, como liñas de produción automatizadas, robótica e outros campos.
Dado que a resposta do motor paso a paso só está determinada polo pulso de entrada, pódese empregar o control en bucle aberto, o que simplifica e fai que o control da estrutura do motor sexa menos custoso. O control en bucle aberto tamén reduce a complexidade do sistema e os custos de mantemento.
Alto par motor a baixas velocidades
Os motores paso a paso teñen unha saída de par elevado a baixas velocidades, o que os fai excelentes en aplicacións que requiren baixa velocidade e alto par, como máquinas de etiquetado automáticas e máquinas de envasado.
Os motores paso a paso teñen o par máximo cando están parados, unha característica que os fai vantaxosos en aplicacións onde se require estabilidade posicional ou resistencia a cargas externas.
Alta fiabilidade

Os motores paso a paso non teñen escobillas, o que reduce as avarías e o ruído debido ao desgaste das escobillas. Isto fai que os motores paso a paso sexan moi fiables, e a vida útil do motor depende en gran medida da vida útil dos rodamientos.
Os motores paso a paso teñen unha estrutura simple, que consta de tres partes: o propio motor, o controlador e o controlador, o que facilita a instalación e o mantemento.
Ampla gama de velocidades

Os motores paso a paso teñen un rango de velocidade relativamente rápido e a velocidade do motor pódese cambiar axustando a frecuencia dos pulsos. Isto permite que o motor paso a paso se adapte a diferentes velocidades de traballo e requisitos de carga.
Boa resposta de arranque e parada e marcha atrás
Os motores paso a paso responden rapidamente aos sinais de control ao arrancar e parar, e manteñen unha alta precisión e estabilidade ao retroceder. Esta característica fai que o motor paso a paso teña unha vantaxe na necesidade de arranques e paradas frecuentes e na inversión da aplicación.
II, as desvantaxes dos motores paso a paso
Fácil de perder o paso ou pasarse de alto
Se non se controlan axeitadamente, os motores paso a paso son susceptibles de sufrir desfases ou sobrepasos. Desfases significan que o motor non xira segundo un número predeterminado de pasos, mentres que desfases significan que o motor xira máis dun número predeterminado de pasos. Ambos fenómenos provocan unha perda de precisión posicional do motor e afectan ao rendemento do sistema.
A xeración de desfases e sobrepasos está relacionada con factores como a carga do motor, a velocidade de rotación e a frecuencia e amplitude do sinal de control. Polo tanto, ao usar motores paso a paso, estes factores deben considerarse coidadosamente e tomarse as medidas axeitadas para evitar a aparición de desfases e sobrepasos.
Dificultade para alcanzar altas velocidades de rotación
A velocidade de rotación dun motor paso a paso está limitada polo seu principio de funcionamento e, polo xeral, é difícil conseguir unha velocidade de rotación alta. Aínda que é posible aumentar a velocidade do motor aumentando a frecuencia do sinal de control, unha frecuencia demasiado alta provocará problemas como o quecemento do motor, o aumento do ruído e mesmo pode danalo.
Polo tanto, ao usar motores paso a paso, é necesario seleccionar o rango de velocidade axeitado segundo os requisitos da aplicación e evitar funcionar a altas velocidades durante longos períodos de tempo.
Sensible aos cambios de carga
Os motores paso a paso requiren control en tempo real do número e a frecuencia dos pulsos de corrente durante o funcionamento para garantir un control preciso da posición e a velocidade. Non obstante, no caso de grandes cambios de carga, o pulso de corrente de control verase alterado, o que resultará nun movemento inestable e mesmo nun paso a paso incontrolado.
Para solucionar este problema, pódese empregar un sistema de control en bucle pechado para monitorizar a posición e a velocidade do motor e axustar o sinal de control segundo a situación real. Non obstante, isto aumentará a complexidade e o custo do sistema.
Baixa eficiencia
Dado que os motores paso a paso se controlan entre paradas e arranques constantes, a súa eficiencia é relativamente baixa en comparación con outros tipos de motores (por exemplo, motores de corrente continua, motores de corrente alterna, etc.). Isto significa que os motores paso a paso consomen máis enerxía para a mesma potencia de saída.
Para mellorar a eficiencia dos motores paso a paso, pódense empregar medidas como a optimización dos algoritmos de control e a redución das perdas do motor. Non obstante, a implementación destas medidas require un certo nivel de tecnoloxía e investimento en custos.
III, o ámbito de aplicación dos motores paso a paso:
Os motores paso a paso úsanse amplamente en moitos campos debido ás súas vantaxes únicas e certas limitacións. A continuación, ofrécese unha análise detallada do ámbito de aplicación dos motores paso a paso:
Sistemas de robótica e automatización
Os motores paso a paso úsanse amplamente en robots industriais, liñas de produción automatizadas e outros campos. Poden controlar con precisión a velocidade e a dirección do movemento dos robots e lograr un posicionamento de alta precisión e unha resposta rápida en procesos de produción automatizados.
Máquinas-ferramentas CNC

Impresoras

Os motores paso a paso utilízanse para controlar o movemento do cabezal de impresión en dispositivos como as impresoras de inxección de tinta e láser. Ao controlar con precisión o movemento do motor, pódese conseguir impresión de texto e imaxes de alta calidade. Esta característica fai que os motores paso a paso sexan amplamente utilizados nos equipos de impresión.
Dispositivos médicos

Os motores paso a paso utilízanse en equipos de imaxe médica (por exemplo, máquinas de raios X, escáneres de TC, etc.) para impulsar o movemento do marco de dixitalización. Ao controlar con precisión o movemento do motor, pódense obter imaxes rápidas e precisas do paciente. Esta característica fai que os motores paso a paso desempeñen un papel importante nos equipos médicos.
Aeroespacial

Os motores paso a paso utilízanse para controlar o movemento dos actuadores en equipos aeroespaciais como o control de actitude por satélite e os sistemas de propulsión de foguetes. Os motores paso a paso presentan un bo rendemento baixo os requisitos de alta precisión e alta estabilidade. Esta característica fai que os motores paso a paso sexan unha parte importante do campo aeroespacial.
Equipamento de entretemento e xogos

Os motores paso a paso utilízanse para controlar o movemento dos actuadores en dispositivos como gravadores láser, impresoras 3D e controladores de xogos. Nestes dispositivos, o control preciso dos motores paso a paso é fundamental para conseguir un produto de alta calidade e unha excelente experiencia de usuario.
Educación e Investigación

Os motores paso a paso utilízanse para controlar o movemento de plataformas experimentais en escenarios como instrumentos de laboratorio e equipos de ensino. No ámbito educativo, o baixo custo e a alta precisión dos motores paso a paso convértenos en ferramentas de ensino ideais. Ao utilizar as características de control precisas dos motores paso a paso, poden axudar aos estudantes a comprender mellor os principios da física e a enxeñaría.
En resumo, os motores paso a paso teñen as vantaxes da alta precisión, controlabilidade, baixa velocidade e alto par, e alta fiabilidade, pero tamén teñen as desvantaxes de ser fáciles de desconectar ou desconectar, difíciles de alcanzar altas velocidades de rotación, sensibles aos cambios de carga e baixa eficiencia. Ao seleccionar motores paso a paso, é necesario considerar as súas vantaxes e desvantaxes, así como o ámbito de aplicación segundo os requisitos da aplicación para garantir o rendemento e a estabilidade do sistema.
Data de publicación: 14 de novembro de 2024